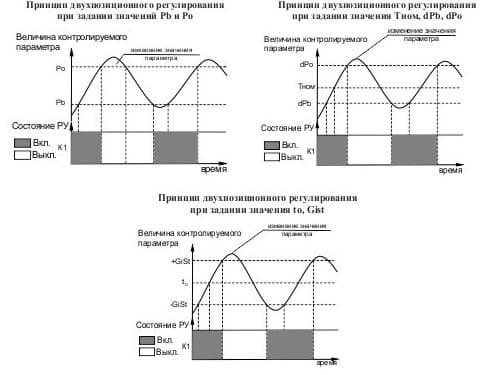
Двухпозиционный закон регулирования (2П) – самый широко распространенный. Регулирование осуществляется с помощью одного РУ (К1) для одного канала измерения.
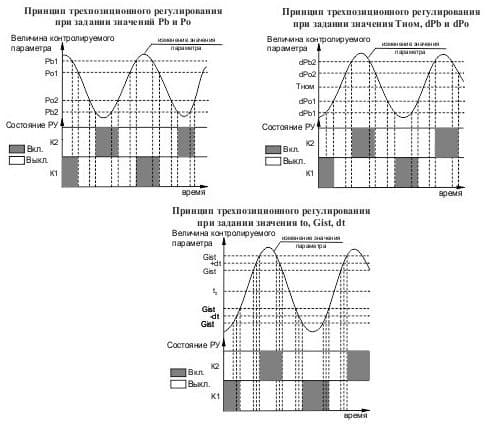
Трехпозиционный закон регулирования (3П) может быть реализован с помощью двух РУ для одного канала измерения. В этом случае, параметры регулирования задаются для двух РУ.
Трехпозиционное регулирование можно использовать для ускорения процесса регулирования.
К пропорциональным законам регулирования относятся ПИД и ПДД.
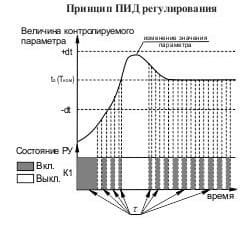
ПИД закон регулирования (ПИД) используется в случае, когда требуется плавный выход на номинальный режим и точное поддержание параметра в заданных пределах. Как правило, ПИД-регулирование предполагает использование бесконтактных силовых устройств (тиристоров, симисторов) для управления мощностью.
Регулирование осуществляется с помощью одного РУ (К1).
ПИД регулирование основано на широтно-импульсной модуляции с постоянной частотой (периодом) и изменяющейся длительностью управляющих импульсов.
При ПИД регулировании на выходе регулятора вырабатывается управляющий сигнал, действие которого направлено на уменьшение отклонения текущего значения контролируемого параметра от заданного номинального значения.
Для эффективной работы регулятора необходимо установить оптимальные для конкретного объекта регулирования значения параметров настройки, при которых переходный процесс не будет содержать переходных колебаний, и выход на заданное значение контролируемого параметра произойдет за минимально короткое время.
Для дискретных выходных устройств выходной сигнал преобразуется в последовательность управляющих импульсов с определенной длительностью каждого импульса и периодом следования управляющих импульсов.
Для аналоговых выходных устройств выходной сигнал преобразуется в пропорциональный ему сигнал тока или напряжения.
Параметрами регулятора являются:
«to» или «Тном» – номинальное значение параметра регулирования;
«dt» – зона пропорциональности (единица измерения параметра);
«bi» – время интегрирования (единица измерения минута);
«bP» («ПР») – период управляющих импульсов.
Значения параметров «bP» («ПР»),«dt» и «bi» определяются характеристикой объекта регулирования и устанавливаются потребителем. Определение параметров ПИД регулирования, обеспечивающее требуемое качество регулирования, достаточно сложная задача на практике. Рекомендуется использовать режим автонастройки для определения параметров регулирования, сохраняя при этом возможность ручной корректировки значений.
Время включения РУ определяется по формуле:
τ = [(t-to)/dt + dF∙νt + Int((t-to),bi)], где t – текущее значение контролируемого параметра;
to – заданное значение параметра;
dt – зона пропорциональности (единица измерения параметра);
νt – скорость изменения контролируемого параметра;
dF – коэффициент при скорости изменения контролируемого параметра;
Int((t-to),bi) – интеграл отклонения значений регулируемого параметра заданной величины to за время bi.
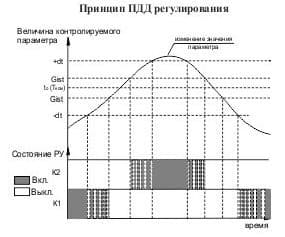
ПДД закон регулирования (ПДД) используется для управления исполнительными устройствами интегрирующего типа (например, регулирующий вентиль с реверсивным электроприводом, сохраняющий свое состояние после снятия управляющего воздействия).
Регулирование осуществляется с помощью двух РУ (К1 и К2). В этом случае включение К1 вызывает, например, плавное открытие вентиля, а включение К2 соответственно его плавное закрытие. Когда оба РУ – выключены, вентиль остается в том положении, которое он занял после последнего регулирующего воздействия.
Задачей ИР при ПДД-регулировании с помощью команд «больше» / «меньше» установить регулирующий клапан в положение соответствующее нулевому отклонению контролируемого параметра.
Для ПДД-регулятора имеются оптимальные парметры, соответствующие конкретному объекту регулирования. Рекомендуется использовать режим самонастройки.
Параметрами регулятора являются:
«to» – заданное значение параметра,
«GiSt» – зона нечувствительности РУ (единица измерения параметра),
«bР» – время рабочего хода регулирующего клапана (единица измерения секунда),
«dt» – зона пропорциональности (единица измерения параметра),
«bi» – период включения РУ (единица измерения минута).
Величина зоны нечувствительности «GiSt» задается потребителем исходя из требуемой точности поддержания параметра и для предотвращения кратковременных включений электропривода при малой разнице измеренного и заданного значений.
Значение «bР» связано со временем рабочего хода (ВРХ) регулирующего клапана (применяемого исполнительного устройства) и также устанавливается потребителем (рекомендуется устанавливать «bР» = ВРХ/2 при линейной зависимости расхода от угла поворота и в пределах ВРХ/4 при нелинейной зависимости). Значения параметров «dt» и «bi», как и в случае ПИД-регулятора, задаются потребителем. Рекомендуется использовать режим самонастройки.
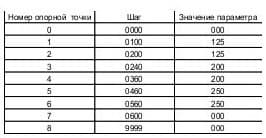
Программное регулирование заключается в регулировании технологическим процессом по заранее заданной программе. График изменения параметра во времени заносится потребителем в энергонезависимую память прибора в виде таблицы, которая состоит из трех граф: номер опорной точки, шаг и значение параметра. Занесенные данные затем интерпретируются программой прибора в виде пошагового изменения текущего значения задания в соответствии с таблицей задания.
Программное регулирование может осуществляться по одной из семи программ, содержащей семь опорных точек, или по одной программе, содержащей до 49 опорных точек.
Основным параметром программного регулятора является шаг программы.
Дискретность задания шага – 1 мин, 1 ч, 1 сут.
Максимальное число шагов – 9998 (приблизительно 166 ч).
Шаг нулевой точки принимается равным "0000". Соотношение шага и величины параметра задает темп нарастания параметра. В пределах числа опорных точек и максимального значения шагов программы потребитель самостоятельно определяет желаемый темп нарастания параметра, интервалы стабилизации и длительность самого процесса.
При программном регулировании используются основные законы регулировании – 2П, 3П, ПДД и ПИД (оговаривается при заказе).
Принцип программного регулирования
Допустим, имеется некоторый технологический процесс, который определяется следующим графиком.
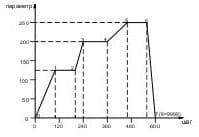
В соответствии с графиком составляется таблица, данные из которой заносятся в энергонезависимую память прибора. Прибор отслеживает изменение графика по шагам и при считывании шага 9999 останавливает процесс.
В пределах числа опорных точек и максимального значения шагов программы потребитель самостоятельно определяет желаемый темп нарастания параметра, интервалы стабилизации и длительность самого процесса.
Фазовое регулирование заключается в поддержании заданного значения контролируемого параметра посредством изменения напряжения, подаваемого на объект регулирования в зависимости от соотношения измеренного и заданного значения контролируемого параметра. Для управления выходными сигналами применяются три симистора с фазовым управлением.
Благодаря фазовому управлению возможно плавное изменение тока через нагрузку, что предотвращает термоудары и увеличивает время эксплуатации оборудования.
При фазовом регулировании используются основные законы регулировании – 2П, 3П, ПДД и ПИД (оговаривается при заказе). Согласно выбранному закону регулирования осуществляется анализ результатов сравнения измеренного значения контролируемого параметра с заданным значением задания регулятора, выработка на их основе сигналов регулирующих воздействий.